Tsukuba Challenge [ Real World Robot Challenge (RWRC) ] is a competition of autonomous mobile robot run in real environment (Tsukuba Center Park). The competition is not about how fast the robot can reach the goal, but how the robot can interact with surrounding environment.
Me and my Lab were joined the competition.
Team number 17.
Robot name = MG10
Gunma University feat Mitsuba, Inc.
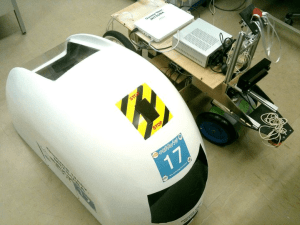
MG10. Intel inside! ^_^

Micro-controller, etc
Sensor :
– Stereo Camera (rgb image)
– Wheel encoder (odometry data)
– Laser Range Finder (obstacle detection)
Autonomous navigation system:
– SURF based image recognition
– HOUGH transform
– Line detection
– Sky detection
– Triangle detection
– Tile pattern recognition

Project member :
-Shioya Toshiaki (Phd. student)
-Tsunoda Yuuki (Master student)
-Hirano Yuuta (Master student)
-Dzulfahmi (Bachelor student)
-Kodaira Hiroyuki (Bachelor student)
-Ohta Naoya (Professor)
And yup, I recorded the video when MG10 was in action. ^_^
First Day
Final Round

Recent Comments